Drone props generate lift the same way airplane wings do: by using an airfoil shape that creates a pressure difference between two surfaces.
The airfoil principle
Each propeller blade is shaped in cross-section like a wing: curved on top and flatter on the bottom. As the blade spins, air moves faster over the curved upper surface than the flat lower surface. Faster-moving air creates lower pressure (Bernoulli's principle), so lower pressure above the blade and higher pressure below creates an upward force. This is lift.
Newton's third law component
The airfoil effect is only part of the story. The blade is also angled relative to its direction of travel: it hits the air at a positive angle of attack, pushing air downward. By Newton's third law, pushing air downward creates an equal and opposite upward force on the blade. Both mechanisms contribute to total thrust, and at typical drone RPMs, the reaction force component is substantial.
How thrust is controlled
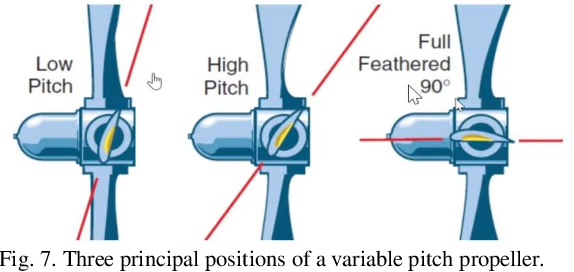
In a quadcopter, the flight controller adjusts motor speed (and therefore prop RPM) on each motor independently, hundreds of times per second. More RPM means more thrust from that prop. Differential thrust between motors is how the drone pitches, rolls, and changes altitude. There are no moving parts in the props themselves, no pitch-changing mechanisms. All control comes from varying motor speed.
Ground effect
Within about one prop diameter of the ground, the drone enters a phenomenon called ground effect: the downwash from the props cannot fully dissipate and builds a cushion of higher-pressure air beneath the drone. This reduces the power needed to hover near the ground, which is why drones seem to "stick" near the surface during landing. Some pilots notice the drone becomes slightly more responsive to throttle changes as it climbs out of ground effect.