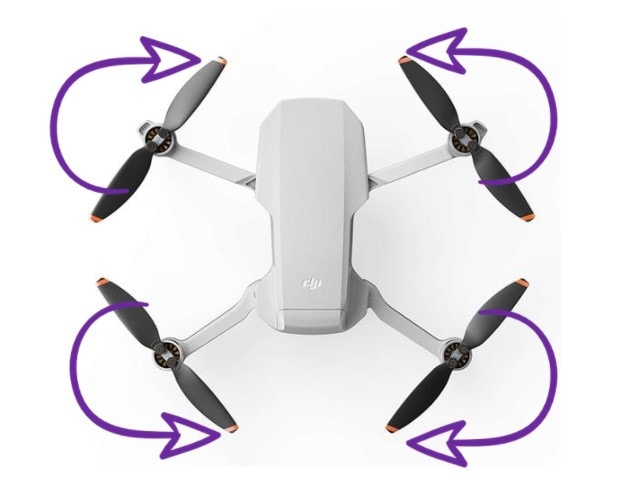
Attitude vs. GPS Hold Modes
Consumer drones operate in two main stability modes. In GPS mode, the drone actively tracks its GPS coordinates and fights to stay at the same lat/lon/altitude. A gust pushes it sideways and the controller detects the movement, tilts to apply counter-thrust, and returns to the original position. This is what makes modern drones feel "locked in place."
In attitude mode (Atti mode on DJI, sometimes called ATTI), the GPS hold is disabled. The drone still self-levels using its IMU, so it won't flip, but it will drift with the wind. Atti mode was common on older DJI models and is sometimes deliberately used by professional videographers for smoother, more cinematic drift shots.
Why Smaller Drones Struggle More in Wind
A 249g DJI Mini 4 Pro has less inertia than an 895g DJI Air 3S. When a crosswind hits, the lighter drone experiences a larger percentage change in its trajectory and must correct more aggressively. The flight controller can compensate up to a point, but in strong gusts the motors may not have enough thrust headroom to hold position while also maintaining altitude.
Tip: DJI rates wind resistance in Beaufort scale levels. Mini 4 Pro is rated Beaufort 5 (fresh breeze, up to 38 km/h). Air 3S and Mavic 4 Pro are rated Beaufort 7 (near gale, up to 61 km/h). If you're flying in gusty conditions, the spec sheet number matters.
How Air Density and Temperature Affect Drone Flight
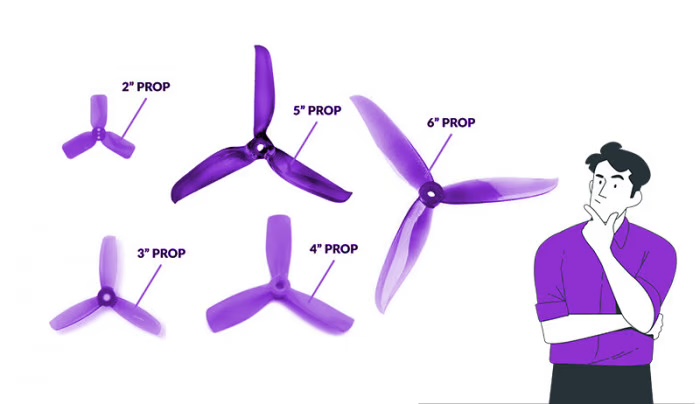
Drone propellers generate thrust by pushing air downward. In thin air, there are fewer air molecules per cubic meter to push, so each rotation produces less thrust. At 3,000 meters elevation, air density is roughly 25% lower than at sea level. A drone that hovers comfortably at the coast may struggle at altitude, running motors harder to generate the same lift, which drains the battery faster and reduces flight time.
Temperature affects motor efficiency and battery output. Cold batteries deliver less current, which limits maximum motor speed. Hot air (high temperature reduces density slightly) compounds the elevation effect. Professional operators flying in mountains or deserts account for this with more conservative altitude and payload limits. For most hobbyists at sea level in moderate temperatures, the effect is negligible.
Return to Home and Obstacle Sensing
Most GPS drones include an automated Return to Home (RTH) function that activates when the signal is lost or battery reaches a critical level. The drone climbs to a preset safe altitude, navigates back to its recorded home point using GPS, and descends. Higher-end models add obstacle avoidance sensors that can detect and avoid obstacles during RTH automatically.