The number of propellers a drone has determines more than just its looks. Propeller count controls redundancy (whether the drone can keep flying after a motor failure), thrust efficiency, agility, noise, and cost. A tricopter with 3 props handles completely differently from a hexacopter with 6, even if both weigh the same.
Most consumer drones you've seen have 4 propellers because the quadcopter configuration is the minimum needed for full 3D control without mechanical parts like servos. Fewer than 4 props requires a tail rotor or servo for yaw control. More than 4 adds redundancy at the cost of weight and complexity.
This guide covers every mainstream propeller configuration, why each count exists, what the coaxial setups actually do, and how many blades per propeller interacts with prop count.
How Many Propellers Does a Drone Have: The Main Configurations
Quadcopter (4 props), hexacopter (6 props), and octocopter (8 props) are the three most common multi-rotor configurations
The Full Configuration Table
Configuration
Props
Arms
Yaw method
Typical use
Example models
Bicopter
2
2
Tilting motors
Experimental, research
Custom DIY builds
Tricopter
3
3
Rear servo tilt
Hobbyist builds, experimental
David Windestal designs
Quadcopter
4
4
Differential speed
Consumer drones, FPV, photography
DJI Mini 4 Pro, Mavic 4 Pro, Air 3S
Hexacopter
6
6
Differential speed
Professional camera, payload work
DJI Matrice 350 RTK, Freefly Alta 6
Octocopter
8
8
Differential speed
Heavy professional/commercial
DJI Agras T40, Freefly Alta 8
Y6 (coaxial)
6
3
Differential speed
Compact professional builds
3DR Y6 (discontinued)
X8 (coaxial)
8
4
Differential speed
Compact high-payload builds
DJI S1000 (discontinued)
VTOL hybrid
5 (typical)
4+1
Mixed
Long-range mapping, delivery
WingtraOne, senseFly eBee X
Why 4 Is the Most Common Number
Four propellers is the minimum count that gives a drone full 3D control (roll, pitch, yaw, and vertical motion) using only variable motor speed, with no mechanical parts like servos. Two props spin clockwise (CW), two spin counter-clockwise (CCW). Changing the relative speed of the CW versus CCW props controls yaw. This makes the quadcopter mechanically simple, lightweight, and easy to control.
A quadcopter can use motor speed alone for all 6 degrees of control. Any fewer props requires a mechanical servo or tail rotor for yaw.
Tricopter and Quadcopter: The 3 and 4 Propeller Configurations
Tricopters use a tilting tail rotor mechanism to achieve yaw control, which quadcopters achieve through differential motor speed
Bicopters: 2 Propellers
A bicopter uses two propellers on two arms and achieves flight by tilting the motor mounts to direct thrust. This is mechanically complex: the tilting mechanism handles pitch, roll, and yaw, which a fixed quadcopter achieves purely through motor speed variation. Bicopters are extremely rare commercially and are almost exclusively experimental or research platforms. Their main appeal is low motor count for a given lift capacity, but the tilting mechanism adds weight, complexity, and failure points that make them impractical for production drones.
Tricopters: 3 Propellers
A tricopter uses one propeller per arm arranged in a Y pattern. Because three equally-spaced props cannot achieve yaw control through differential speed alone (they can't cancel each other's torque the way four can), tricopters use a servo mechanism to tilt the rear motor. Tilting the rear prop generates the lateral thrust needed for yaw.
Tricopters are rare in commercial drones because the servo adds a mechanical failure point, requires tuning, and wears out over time. They were popular in early YouTube hobbyist builds around 2010 to 2015 when frame kits were expensive and pilots wanted to cut one motor. Today, quadcopter frames are cheap enough that the servo complexity is rarely worth it.
Quadcopters: 4 Propellers
The quadcopter is the dominant configuration for consumer, FPV, and prosumer drones. Examples include every DJI Mini and Mavic model, the Autel EVO series, and essentially all FPV racing drones. The layout is typically X or H frame with two diagonal motors spinning CW and two spinning CCW.
The main limitation of a quadcopter is zero redundancy: if one motor fails, the drone loses the ability to counteract that motor's torque and will spin uncontrollably before falling. Most quadcopters have no motor-out recovery capability. This is why professional drone work for payload delivery or critical inspections uses hexacopters or octocopters.
Tip: FPV quadcopters often fly on under-hung props (motors mounted upside down under the arms) called "deadcat" or "squished X" frames. This changes the arm position but the prop count stays at 4.
Hexacopter and Octocopter: Why More Propellers Add Redundancy
Hexacopters like the Flywoo HEXplorer can continue flying after one motor failure, which quadcopters cannot do
Hexacopters: 6 Propellers
A hexacopter adds two more arms and motors to a standard quadcopter layout, arranged in either a flat hex pattern or two stacked tricopter arms (Y6, covered separately). The key advantage is motor-out survivability: if one of six motors fails, the flight controller can adjust the remaining five to maintain stable flight, allowing a controlled landing rather than a crash.
Hexacopters are common in professional cinema and inspection work where payload and redundancy matter more than portability. The DJI Agras series for agriculture and Freefly Alta for cinema are hexacopter designs. Consumer hexacopters exist (Flywoo HEXplorer is a notable FPV example) but are rare because the redundancy benefit doesn't justify the weight and cost for hobbyist use. Expect to spend over $2,000 for a production-quality hexacopter.
Octocopters: 8 Propellers
Eight propellers provide maximum redundancy: an octocopter can lose two motors and still land safely, as long as the failed motors are not adjacent. They're used for critical payload work where a crash would be catastrophic: precision agriculture, search-and-rescue, film production with a RED camera rig, or medical delivery.
Octocopters are heavy and expensive. The Freefly Alta 8 weighs 6.7 kg empty. They're not portable and are almost never used recreationally. If you see one, it's probably carrying something expensive or doing something important.
The Efficiency Tradeoff
More propellers means more weight and more motor controllers, which reduces efficiency. A quadcopter with four large, slow-spinning props is more power-efficient per gram of thrust than an octocopter with eight smaller props running at the same total thrust. The redundancy gain has a real efficiency cost, which is why the quadcopter remains the default for everything where motor-out survivability isn't a hard requirement.
Coaxial Configurations: How Stacked Propellers Work on Drones
What Coaxial Means
A coaxial configuration stacks two propellers on the same arm, one above the other on the same axis of rotation. The two props spin in opposite directions (one CW, one CCW) to cancel torque. This gives you more thrust from a compact footprint than a flat configuration, but with an efficiency penalty: the lower prop operates in the disturbed air from the upper prop, reducing its effective thrust by 10 to 20%.
Y6: 6 Props on 3 Arms
A Y6 has three arms arranged in a Y pattern (like a tricopter), but each arm carries two stacked motors and props instead of one. The result is 6 propellers on 3 arms. This is mechanically simpler than a flat hexacopter because fewer arms means a smaller frame footprint, but the coaxial efficiency penalty applies to all three arm positions.
Y6 designs are compact for their thrust output, making them useful for aerial photography where the photographer needs a smaller profile but still wants more than four props. The 3DR Y6 (2013 to 2015) was one of the best-known examples before 3DR shifted to software.
X8: 8 Props on 4 Arms
An X8 uses the standard quadcopter X-frame layout but stacks two motors per arm, giving 8 propellers on 4 arms. The X8 is more compact than a flat octocopter and is common in cinema rigs where total diameter needs to stay under a limit. The DJI S1000 Spreading Wings (now discontinued) was an X8 design.
10-20%Coaxial efficiency loss
3 armsY6 configuration
4 armsX8 configuration
Are Coaxial Drones Worth It?
Coaxial designs offer a compact footprint for a given prop count but sacrifice efficiency for it. Modern engineering has largely moved toward larger individual props on extended arms rather than stacked coaxial configs. For most professional applications today, a flat hexacopter or octocopter outperforms the equivalent coaxial design in both efficiency and yaw control response.
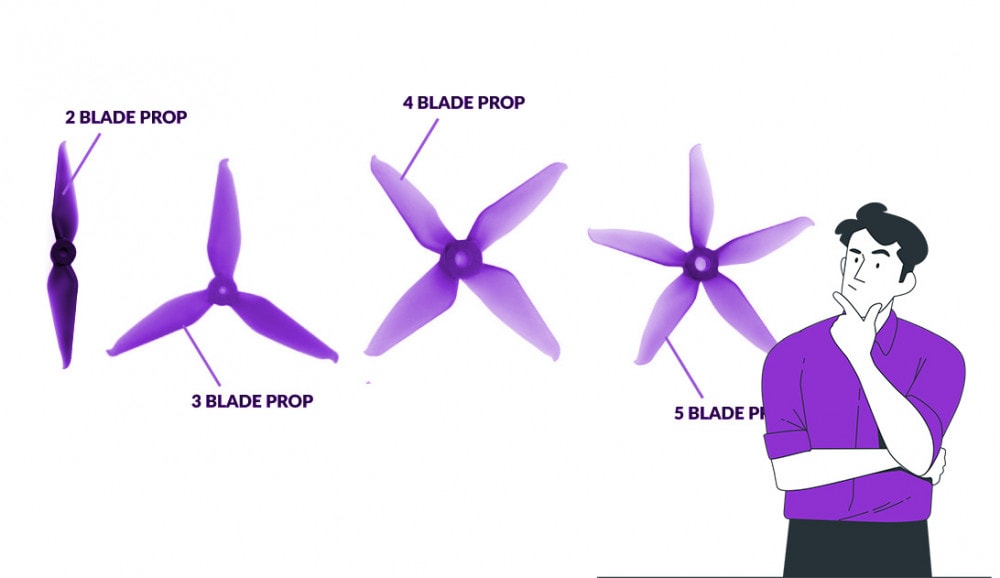
How Many Propeller Blades Per Propeller: 2-Blade vs. 3-Blade vs. 4-Blade
Blade count affects noise, efficiency, and thrust characteristics independently from the number of propellers
2-Blade Props: Most Efficient
Two-blade propellers dominate consumer and camera drones because they are the most aerodynamically efficient configuration for given prop diameter and motor speed. DJI uses two-blade props on most consumer models (Mini series, Mavic series, Air series) for exactly this reason. At typical drone prop sizes (5 to 9 inches), a two-blade prop generates the most thrust per watt of power consumed.
3-Blade Props: Common in FPV
Three-blade props generate more thrust per revolution than two-blade props of the same diameter, at the cost of slightly more drag and higher current draw. FPV racing and freestyle pilots often prefer 3-blade props (common sizes: 5x4.3x3 or 5x4x3, where the third number is blade count) because the increased thrust allows faster acceleration and snappier response, which matters more than battery efficiency during a 3-minute race.
DJI's FPV drone uses tri-blade props. The DJI Mini 3 introduced optional tri-blade props that the Mini 3 Pro also uses, trading some flight time for quieter operation due to lower RPM at equivalent thrust.
4-Blade Props and Higher
Four-blade and higher blade counts are uncommon on consumer drones. They appear on industrial and agricultural platforms where noise reduction is a design goal. Multiple blades allow a given thrust level to be achieved at lower RPM, which reduces noise and vibration. The efficiency cost and added prop weight make them impractical for battery-powered consumer drones where flight time is the primary constraint.
Note: Prop blade count and drone motor count are independent. A quadcopter (4 motors) can use 2-blade, 3-blade, or 4-blade props. Changing blade count on the same drone changes flight time and thrust characteristics without changing the motor configuration.
FAQ
The DJI Mini 4 Pro is a quadcopter with 4 propellers: two spinning clockwise and two spinning counter-clockwise. Each propeller has two blades. This is standard for all DJI Mini and Mavic series drones.
A quadcopter cannot fly normally with only 3 working propellers. Losing one motor causes uncontrolled spinning from the unbalanced torque. Some advanced flight controllers have experimental 3-motor recovery modes, but these cannot maintain stable flight for most drones. Tricopters are designed from the ground up for 3 props and use a tail servo for yaw control.
A hexacopter has 6 propellers on 6 arms and can survive one motor failure. An octocopter has 8 propellers on 8 arms and can survive two motor failures (as long as they're not adjacent). Octocopters carry heavier payloads and are used in professional cinema and commercial applications where redundancy is critical.
Four propellers is the minimum count that allows a drone to achieve full 3D control using only variable motor speed, without servos or other mechanical components. Two props spin clockwise and two spin counter-clockwise, and differential speed between them controls yaw. This makes quadcopters mechanically simple, light, and reliable.
A coaxial drone stacks two propellers on the same arm axis, with one prop above the other spinning in opposite directions. Y6 (6 props on 3 arms) and X8 (8 props on 4 arms) are coaxial configurations. Coaxial stacking reduces the drone's footprint but introduces a 10 to 20% efficiency penalty because the lower prop operates in disturbed air from the upper one.
More propellers add redundancy and sometimes higher payload capacity, but they also add weight, power consumption, and cost. For recreational use, a quadcopter is almost always the right choice. More propellers are worth it for professional work where a crash has serious consequences or where payloads exceed what a quadcopter can carry.
Two-blade props are more energy-efficient and are used on most camera drones to maximize flight time. Three-blade props generate more thrust per revolution at the same diameter and are common in FPV racing where acceleration and responsiveness matter more than battery life. The DJI Mini 3 offers optional 3-blade props as a quiet alternative.
Most consumer and professional VTOL (vertical takeoff and landing) drones have 5 propellers: 4 vertical-lift rotors arranged like a quadcopter, plus 1 fixed pusher or puller propeller for forward flight. Some larger VTOL platforms use 6 or more lift rotors. The exact count varies by manufacturer and design.
Paul Posea founded Dronesgator in 2015 and has been reviewing consumer drones for over a decade. With 195 YouTube drone reviews drawing 3.55 million views and published work on Digital Photography School, he combines hands-on flight testing with data-driven analysis to help pilots find the right drone.
Marcus Taylor is a UK CAA certified drone pilot and owner of Deployed Consultancy Ltd. With 6 years of commercial experience spanning UN site surveys in West Africa, aerial photography across Europe, Africa, and Japan, and defence consulting, he verifies the technical accuracy of Dronesgator's drone reviews and guides.